Svingete bane
Skrevet av: Oversatt fra Espen Clausen nettside
Oversatt av: Øistein Søvik
Svingete bane
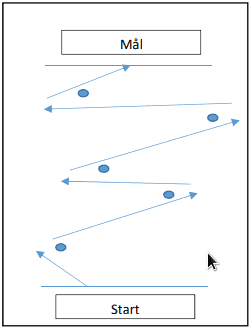
I denne oppgaven skal vi programmere roboten til å kjøre en gitt bane som inneholder ulike svinger. De voksne har bygget en bane på gulvet/bordet enten ved å bruke teip eller elementer som roboten skal kjøre gjennom eller forbi. Det er viktig at roboten ikke berører kantene eller kjører utenfor banen. Banen kan for eksempel se slik ut.
Husk at jo mer du slurver i begynnelsen, og jo vanskeligere er det å komme i mål, og spesielt dersom du må gjøre endringer underveis.
 Fremgangsmåte
Fremgangsmåte
Når dere klarer å kjøre gjennom banen plasseres en løkke litt ut i løypen.
Programmer denne til å løfte opp løkken, slik at den trygt kan bli tatt med til mål. For å programmere den lille motoren, bruker vi «Middels motor». Det er viktig å tenke nøye gjennom hvor mye du skal løfte gjennom rotasjoner/grader.
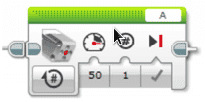
Det kan også være en ide, å sette inn en pause på 1 sekund, slik at roboten får stoppet skikkelig:
Lisens: CC BY-SA 4.0
Forbedre denne siden
Funnet en feil? Kunne noe vært bedre?
Hvis ja, vennligst gi oss tilbakemelding ved å lage en sak på Github eller fiks feilen selv om du kan. Vi er takknemlige for enhver tilbakemelding!