Hinderløype
Skrevet av: Oversatt fra Espen Clausen nettside
Oversatt av: Øistein Søvik
Hinderløype
I denne oppgaven, skal vi konstruere og programmere roboten slik at den ved hjelp av ultralydsensor klarer å bevege seg gjennom en bane med vegger. Her gjelder det å holde kontroll på høyre og venstre svinger, samt passe på å svinge når avstanden til veggen er akkurat passe.
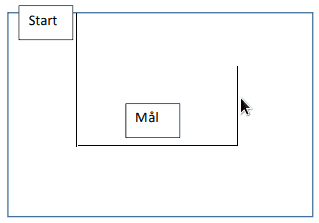
Det å kunne bruke ultralydsensor mot veggene og andre objekter til å manøvrere seg fram på et FLL bord er nyttig og tidsbesparende. I tillegg har en bedre kontroll på hvor roboten er i forhold til veggene og objektene.
 Fremgangsmåte
Fremgangsmåte
Lisens: CC BY-SA 4.0
Forbedre denne siden
Funnet en feil? Kunne noe vært bedre?
Hvis ja, vennligst gi oss tilbakemelding ved å lage en sak på Github eller fiks feilen selv om du kan. Vi er takknemlige for enhver tilbakemelding!